各機能とカメラセンサーの関係
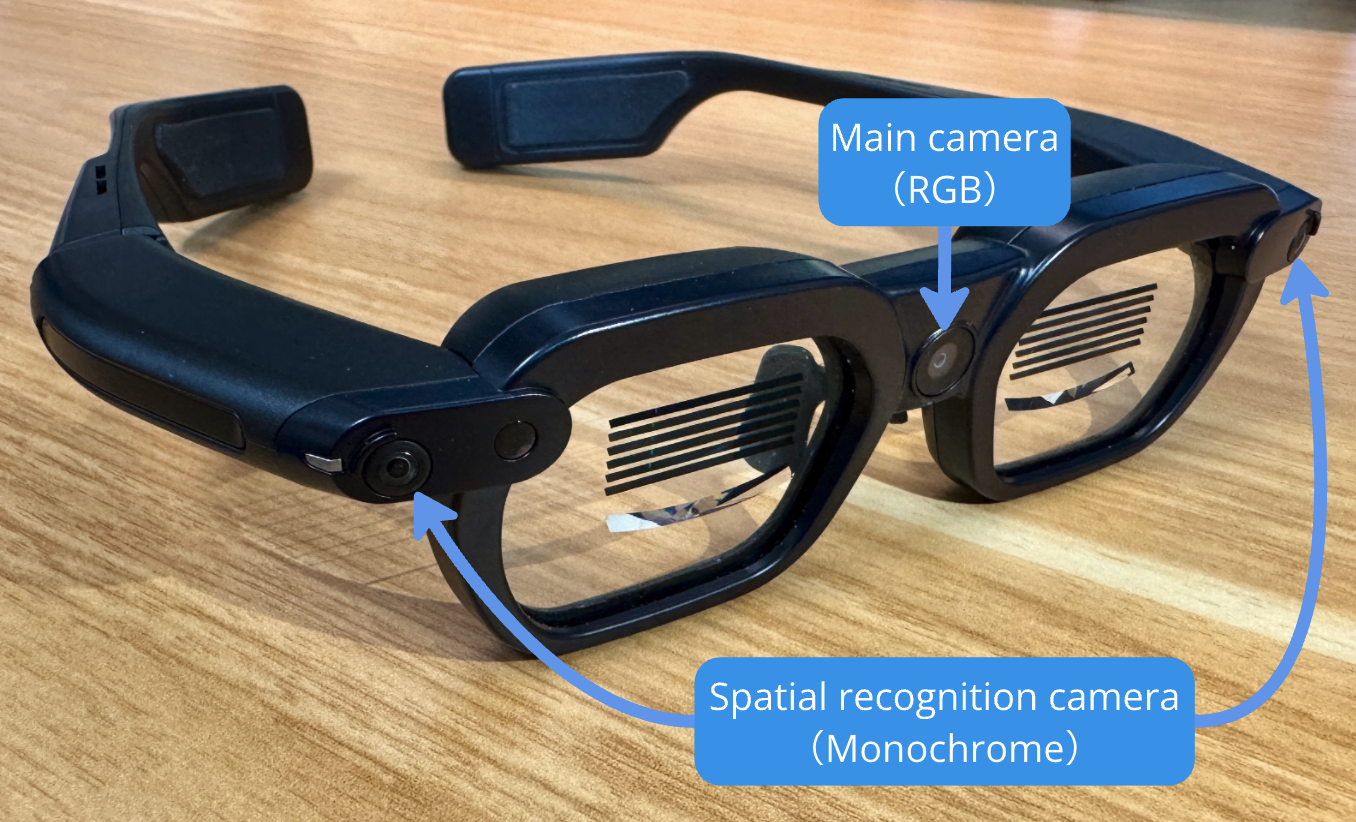
このページではSpacesの機能が、どのカメラを使用しているかを記載しています。
Spacesの一部の機能に不具合が発生した場合は、以下のことを確認することで不具合の原因を探る手がかりになるかもしれません。
- 使用するカメラセンサーが汚れていないか
- 同じカメラセンサーを使用する機能も不具合を起こしていないか
対応表
| 機能 | 使用するカメラ | 補足説明 | |||
|---|---|---|---|---|---|
| 自己位置推定(SLAM) | 空間認識用カメラ | 片方の空間認識用カメラだけでも自己位置推定は継続されますが、精度は落ちます。自己位置をロストした場合は、両方の空間認識用カメラが使用可能である必要があります。 | |||
| カメラへのアクセス | メインカメラ | アプリ内で色付きのカメラ画像を取得するために、メインカメラを使用します。 | |||
| ハンドトラッキング | 空間認識用カメラ | 片方の空間認識用カメラが塞がれても機能は継続して使用出来ますが、精度は落ちます。 | |||
| ヒットテスト | 空間認識用カメラ | 片方の空間認識用カメラが塞がれても機能は継続して使用出来ますが、精度は落ちます。 | |||
| 空間アンカー | 空間認識用カメラ | 片方の空間認識用カメラが塞がれても機能は継続して使用出来ますが、精度は落ちます。 | |||
| 空間メッシュ | 空間認識用カメラ | 片方の空間認識用カメラが塞がれても機能は継続して使用出来ますが、精度は落ちます。 | |||
| 平面検出 | 空間認識用カメラ | 片方の空間認識用カメラが塞がれても機能は継続して使用出来ますが、精度は落ちます。 | |||
| 画像トラッキング | メインカメラ / 空間認識用カメラ | 画像マーカーの初回の認識は、メインカメラで行います。その後の画像マーカーの位置トラッキングは、空間認識用カメラで行います。 | |||
| QRコードトラッキング | メインカメラ | QRコードの認識と位置トラッキングは、メインカメラで行います。 |